
 产品:24
产品:24
 联系我们
联系我们

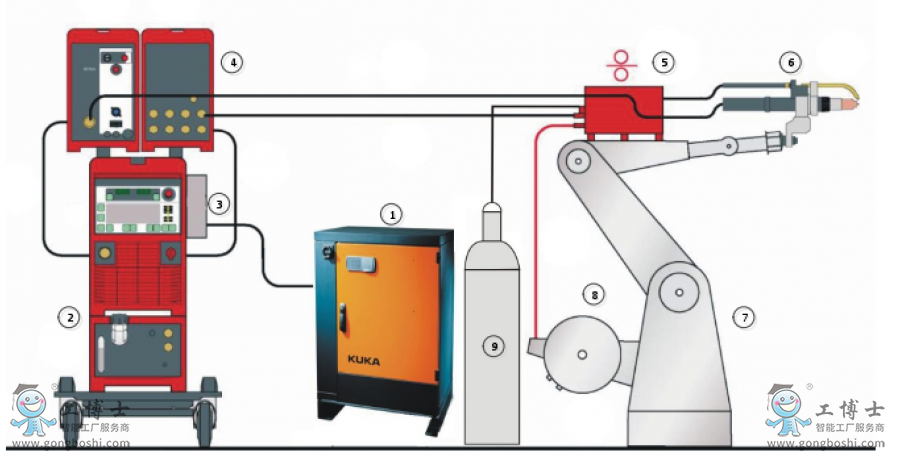
汽车中冷器机器人焊接工作站工作流程如下:
那智机器人
(2)系统运行需要进行初始化设置,各系统的参数按照设计时的缺省值进行初始化,也可以根据具体焊接工艺进行重新设置。初始化完毕后工作站进入系统自检阶段,主要分为机器人系统自检测,激光跟踪系统白检测,弧焊电源系统自检测(包括送丝、供气、供水等),变位机系统自检测(包括气压、气路、伺服电机等),以及各系统的通讯状态检测。子系统自检全部通过后,各系统回到初始位置,等待机器人焊接指令。
(3) 根据待焊中冷器型号选择机器人调用的子程序,设置变位机在焊接过程中需要改变的角度以满足各种焊接位置需求,调整柔性I装的安装位置以适应不同尺寸的中冷器。机器人焊接工作站配合双变位机系统,可完成两种型号中冷器的交替焊接,能有效提高生产效率,实现工作站的柔性化生产。工作站配置多重安全措施,各急停机制相互关联,在比安全机制下运行的焊接I作站,如若发生各种紧急情况,不论操作员在任何工作位置都能及时停止系统,满足了只需要配备一名操作员就可以实现整个中冷器焊接工艺全部流程的设计目标。
(4)中冷器上料完成后,操作人员发送上料完成的信号,机器人程序启动,焊接开始。机器人焊移动到程序中的焊接起点开始搜索焊缝起点,找到焊接起点后焊接缝,焊接完条焊缝, 机器人焊退回到安全位置,并给变位机发送焊缝焊接完成的信号,变位机程序启动,调整中冷器到下一条焊缝焊接姿态,接下来循环上述过程,直至一件中冷器全部焊缝焊接完成。当焊接完一件中冷器后,机器人控制系统通过判断两变位机的上料完成信号来选择下一个焊接工位。两变位机之间采用互锁的机制,同一时间只能有一台变位机与机器人协同作用,A变位机具有优先权。
(5)整个系统可以在自动和手动之间自由切换,当系统处于手动状态时,操作员可以对系统各项功能进行调试,以及对系统的各项参数进行变更;当系统处于自动时,系统后台实时对各个子系统进行检测,出现错误时及时提醒、报警,操作人员能在**一时间进行紧急制动操作,确保工作站人员与设备的安全。
更多资讯:那智机器人
- 下一篇:那智:机器人视觉系统校准与分析焊接机器人
- 上一篇:那智机器人视觉系统的应用